


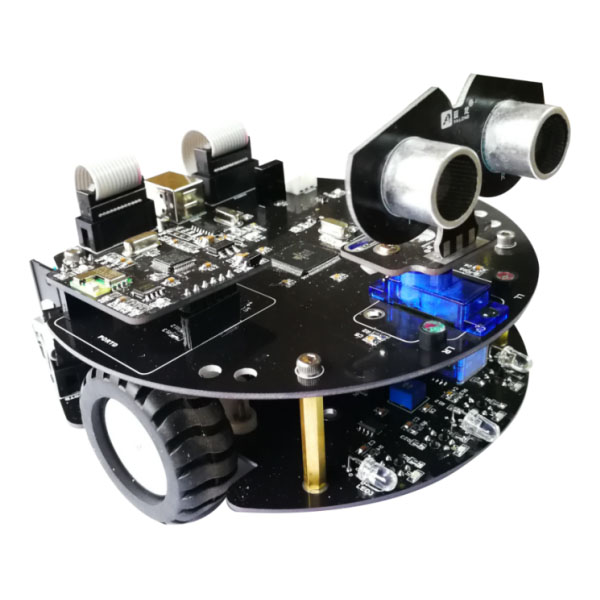

ZL-02G型ZLoongBot
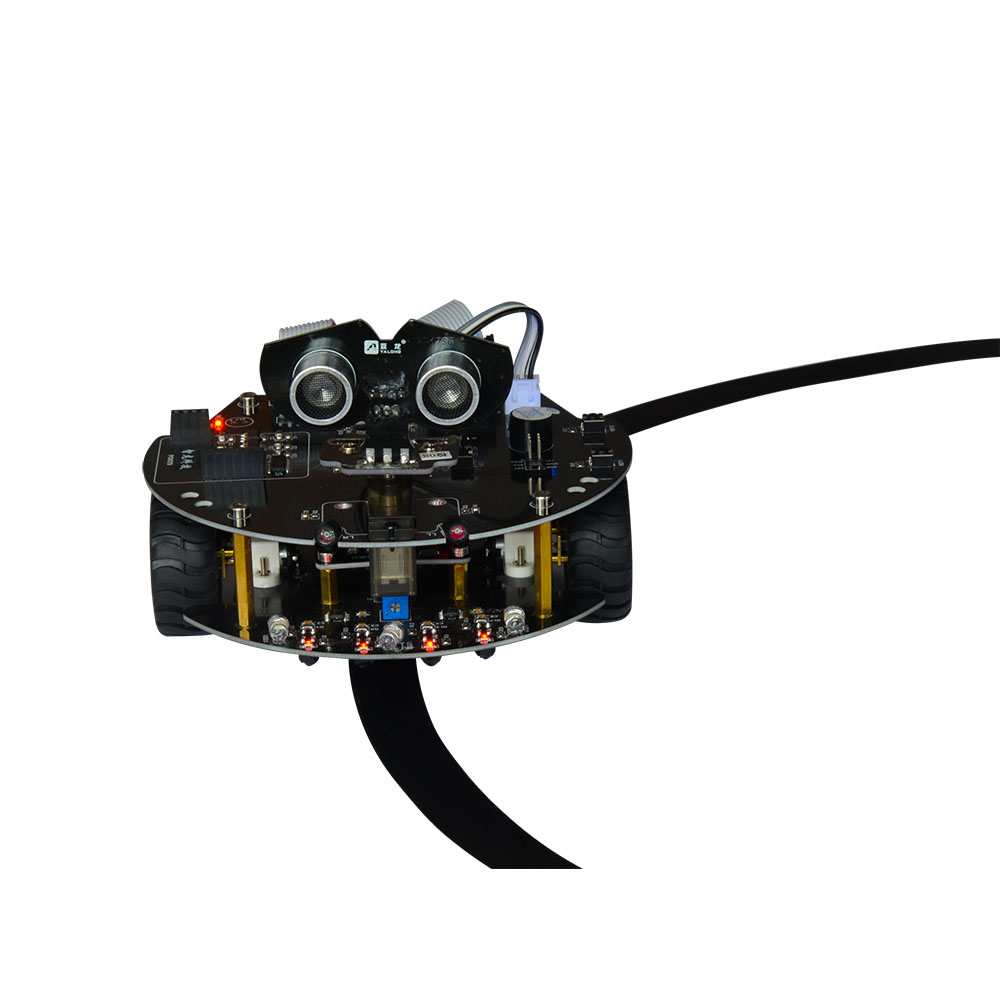
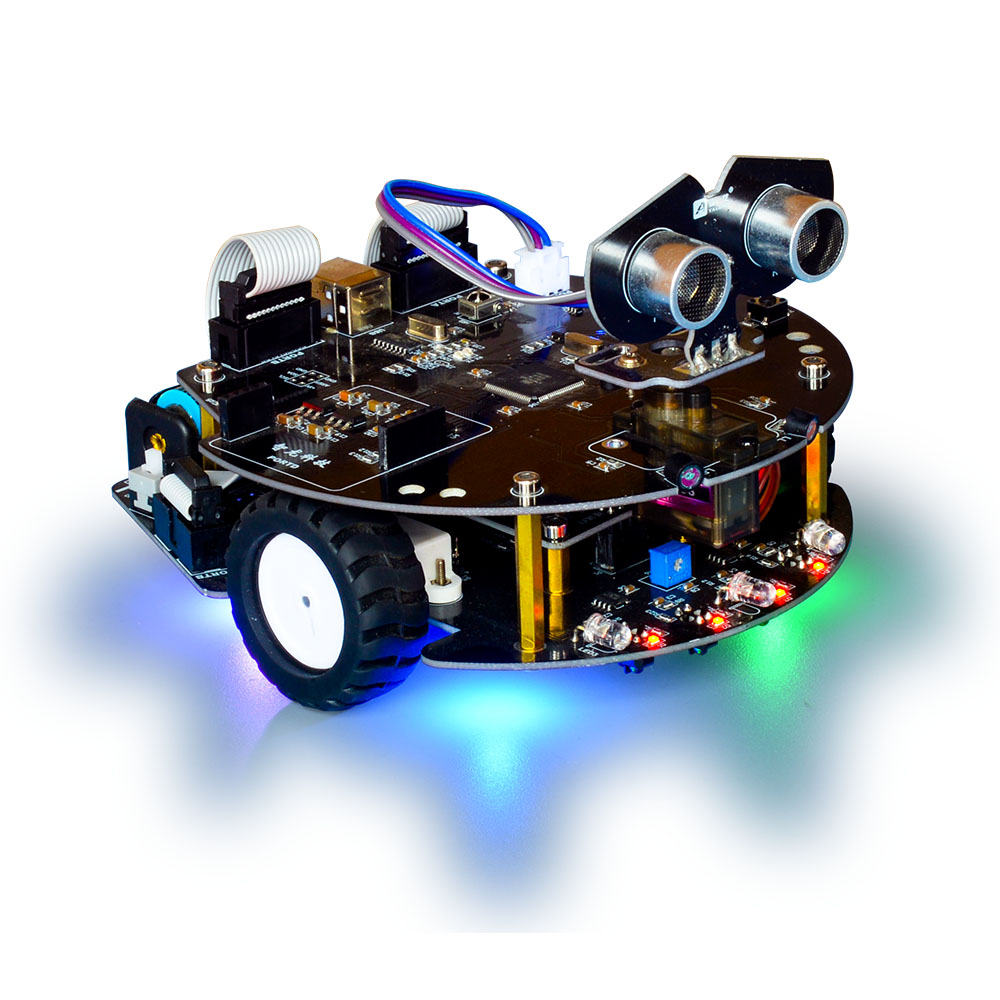
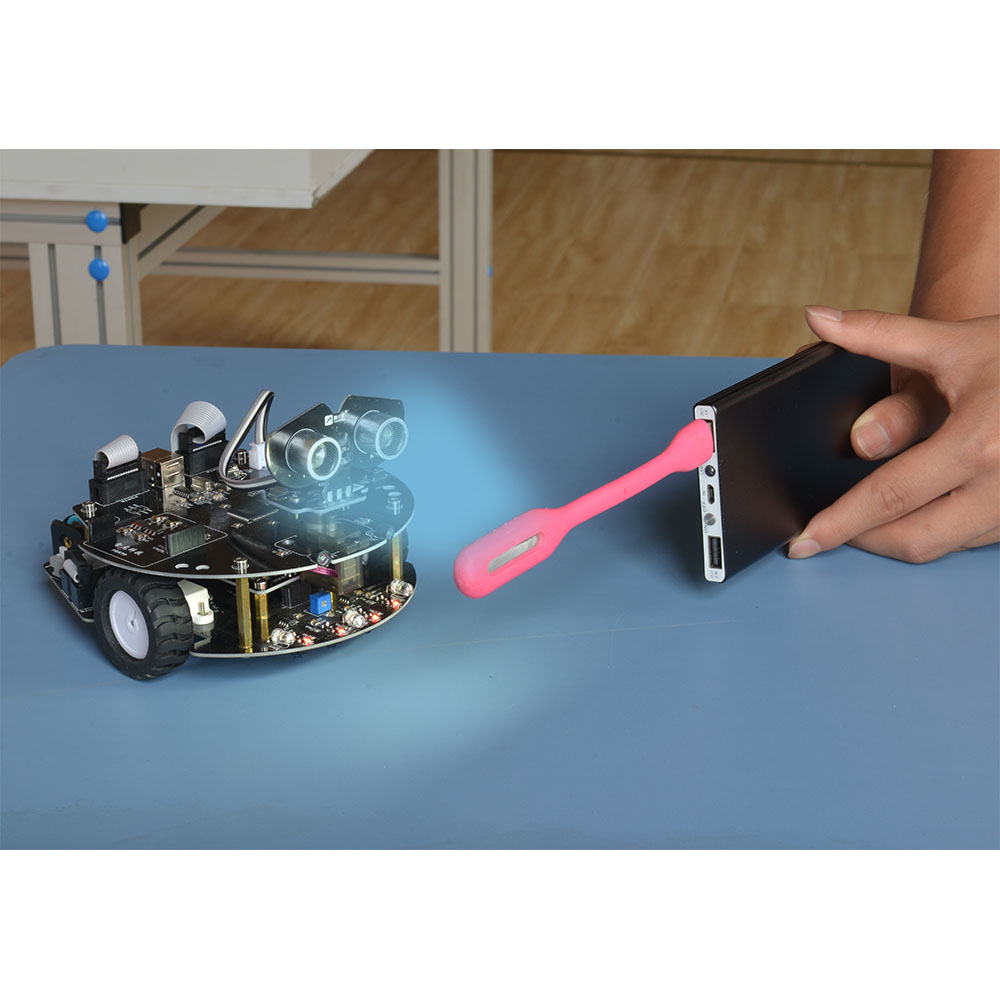
米兰官方web站和智龙ZL-02G型ZLoongBot是一款集机械、电(diàn)子、编(biān)程为一体的人工智能(néng)编(biān)程教育机器人,采用Atmel mega2560控制器,主要由驱动(dòng)模块、主控模块、舵机模块(kuài)、超(chāo)声波模块、语音合成模块、RGB模块、光感(gǎn)模块、蓝牙模块等组成(chéng);内置十余种传感器模块,功能强大,能够(gòu)实现智慧(huì)场景道路判(pàn)断、智能寻迹、直角(jiǎo)巡线、追(zhuī)光、自动避障等功能(néng)。
本(běn)产(chǎn)品适用于青少年学生的编程入门学(xué)习,所(suǒ)有功能可通过图形化编程(chéng)软件、Arduino IDE进行开发,采(cǎi)用(yòng)C、C++语言进行(háng)编程。采(cǎi)用高集成芯片、电路板,结(jié)构轻巧,学生(shēng)通(tōng)过手动拼装(zhuāng),可加深机械部件结(jié)构理(lǐ)解,提高专注力、动手能力;采(cǎi)用(yòng)创新(xīn)性的图形化(huà)编程(chéng)软件(jiàn),结合理论与(yǔ)实践,训练学生计算思(sī)维、深度(dù)思(sī)考能(néng)力、提升学生创造(zào)力、逻辑思维能力、分析和解决问题的能力。
